 2018, Vol. 51
2018, Vol. 51文章信息
- 于娜, 吴功平, 江维, 肖华, 严宇, 邹德华, 张颉, 胡鹏
- YU Na, WU Gongping, JIANG Wei, Xiao Hua, YAN Yu, ZOU Dehua, ZHANG Jie, HU Peng
- 高压线路绝缘子带电更换作业机器人构型与轨迹规划
- Configuration and trajectory planning of insulator charged replacement operation robot for high-voltage transmission line
- 武汉大学学报(工学版), 2018, 51(7): 640-645, 653
- Engineering Journal of Wuhan University, 2018, 51(7): 640-645, 653
- http://dx.doi.org/10.14188/j.1671-8844.2018-07-012
-
文章历史
- 收稿日期: 2017-09-20





2. 湖南省电力公司带电作业管理中心,湖南 长沙 410007
2. Hot-line Work Management Center of Hunan Electric Power Corporation, Changsha 410007, China
带电作业是现代电网的一种常用的检修作业方法,可实现电网不停电检修,而绝缘子串作为输电线路中的一种极其重要又极易损坏的部件,需要定期进行更换,因此绝缘子带电更换成为带电作业的一项重要内容.目前此项工作的开展主要是由人工在地电位或等电位携带专用的工器具进行的,然而,受到较小的横担间和相间距离的制约,检修人员从事等电位作业多有不便,且安全性无法得到保障.带电作业机器人可以有效地克服以上弊端,提高绝缘子带电更换的安全性及智能性.
自20世纪80年代起,日本、西班牙、美国、加拿大、法国[1-2]等国家先后开展了带电作业机器人的研究,采用绝缘斗臂车携带智能化自动工具进行带电作业,但是绝缘斗臂车必须在额定电压范围内的系统上使用,因此该方法多用于配电线路带电检修.架空高压输电线路巡检机器人技术经过几十年的发展及应用,已取得了一定的成果[3].由于巡检机器人在行驶过程中可以与导线等电位,进而有效地对整个系统进行保护,因此针对110 kV及以上输电线路可以采用以移动机器人为作业平台的机械手进行带电作业,其中比较典型的有加拿大魁北克水电研究院研制的检修维护作业机器人[4],其携带单作业机械臂进行线路的维修作业,可以实现导线破损修补与松动螺栓拧紧等作业,但其构型有一定的局限性,无法完成需要双机械臂协同作业的任务.武汉大学、山东电力研究院研制的输电线路除冰机器人、清障机器人[5-6]同样采用单机械臂工作,完成的工作任务较为单一.基于此,本文提出了一种可以沿高压输电线路行驶并由双作业臂携带相应的末端装置进行作业的绝缘子更换机器人.针对悬垂绝缘子串更换作业中机器人的作业任务及作业规划,提出了一种绝缘子更换作业机器人机构构型及样机模型,并研究了作业机器人的运动规划与机械手的轨迹规划.
1 绝缘子更换作业任务规划悬挂于单分裂导线上的单联悬垂绝缘子串的联接结构如图 1所示,悬垂绝缘子串上端通过球头挂环悬挂于杆塔横担上,下端通过W销与碗头挂板联接.因此更换绝缘子串时,需将绝缘子串分别与杆塔横担及碗头挂板分离,绝缘子更换作业机器人的作业任务是代替导线上的施工人员,首先在横担施工人员的配合下,将与碗头挂板相联的绝缘子取出,待横担施工人员将整串绝缘子串取出并在横担处安装新的绝缘子串后,再由机器人将最下端的绝缘子安装到碗头挂板中,从而完成绝缘子串的更换.而在绝缘子与碗头挂板分离之前,需先将W销推出碗头挂板,使绝缘子的球头落于碗头挂板的凹槽的底面,进而将绝缘子从碗头挂板中取出;待绝缘子安装于碗头挂板之后,需将W销推入碗头挂板,防止绝缘子从碗头挂板中松脱.并且碗头挂板需全程保持固定的位姿,便于机器人拆装绝缘子.因此机器人需完成W销的推入/推出以及绝缘子的拆装两项工作,并且在此过程中,需要横担处的作业人员辅助进行导线的松紧.绝缘子更换作业机器人的作业规划如图 2所示.

|
| 图 1 悬垂绝缘子串联接结构 Fig. 1 Connection structure of insulator string |

|
| 图 2 绝缘子更换作业机器人的作业规划 Fig. 2 Operation planning of insulator replacement robot |
为了完成W销的推入/推出以及绝缘子的拆装两项工作,绝缘子更换作业机器人以移动机器人平台为基础,采用双作业机械臂携带相应末端执行机构的结构形式进行设计,其实体模型如图 3所示.本体部分包括移动平台以及双作业机械臂.移动机器人平台由机体、双固定臂、行走轮机构、夹爪以及等电位轮构成.双固定臂在机体中间以一定的距离反对称布置,行走轮机构与固定臂相连,沿导线行走,行走轮一侧的夹爪装置用于护线,在夹爪装置旁安装有等电位轮,保证机器人始终与导线等电位.双作业机械臂于机体两侧布置,分别为3-DOF、4-DOF机构,均采用旋转关节与移动关节相串联的形式构成开放式的运动链.

|
| 图 3 绝缘子更换作业机器人实体模型 Fig. 3 Entity model of insulator replacement robot |
末端执行机构模型如图 4所示,分别由W销推送机构和绝缘子串推送机构构成.由于W销与碗头挂板的相对位置关系一定,W销的位置可在定位碗头挂板后间接获得,因此将W销推送机构设计为集碗头挂板定位夹持与W销推出/推入于一体的结构.该结构分别由3个移动关节完成相应动作,1个移动关节携带一对夹爪实现碗头挂板的夹持,另2个移动关节分别实现W销的推出和推入.绝缘子串推送机构以曲柄摇杆机构为工作原理,由夹爪对绝缘子钢帽进行夹持.W销推送机构与3-DOF作业臂相联接,通过控制3-DOF作业臂进行碗头挂板和W销的定位;绝缘子串推送机构与机械手2相联接,通过控制机械手2进行绝缘子的定位与拆装.

|
| 图 4 末端执行机构模型 Fig. 4 End actuator model |
绝缘子串更换作业机器人取出绝缘子串的流程如图 5所示.在机器人沿导线行驶一段距离的过程中,双作业机械手从初始位姿运动至工作位姿,之后机器人前轮碰检悬垂线夹进行粗定位,此过程如图 5(a)~(c)所示.接着行走轮后移,通过摄像头观察W销推送装置的碗头挂板夹爪相对于碗头挂板的位姿,对机械手1的各关节进行微调,使碗头挂板处于两夹爪中间,待W销推送装置定位碗头挂板后,两夹爪相向移动,夹紧碗头挂板.此时W销推出推块相对于W销的位姿也一并确定,W销推出推块将W销从碗头挂板开口处推至卡口处,此过程如图 5(d)~(f)所示.之后需要人工配合紧线,使绝缘子的球头落于碗头挂板凹槽的底面,机械手2横移关节向后移动,带动绝缘子串推送装置将绝缘子串球头从碗头挂板开口处移出,之后紧线器松线,使绝缘子的球头高出碗头挂板,此过程如图 5(g)~(i)所示.至此,绝缘子与碗头挂板分离,更换新绝缘子串的过程与之相反.

|
| 图 5 绝缘子串更换作业机器人运动规划 Fig. 5 Insulator string replacement operation robot motion planning |
采取联动的方式可以提高机器人的作业效率,但关节的联动涉及各关节的轨迹规划问题.轨迹指的是机械臂的每个关节在特定坐标系下的位置、速度和加速度的时间历程.轨迹规划以运动学为基础,将每个关节变量映射为光滑的时间函数[7].
4.1 基于D-H法建立的绝缘子串更换作业机器人机械手运动学模型绝缘子的拆装工作由机械手2携带绝缘子串推送机构完成,其所需的工作空间较3-DOF作业臂而言更大,因此以机械手2为分析对象.机械手2由横移关节、旋转关节、伸缩关节和纵移关节4部分构成.横移关节、伸缩关节和纵移关节用于确定绝缘子串推送机构相对于绝缘子的位置,其中,横移关节的横移体与移动机器人平台的机体相联接,横移滑台可沿其横向移动,将绝缘子推出/装入碗头挂板.由于机器人进入工作位后,移动机器人平台相对于绝缘子串的位姿固定,因此可将横移体视为机械手2的基座;旋转关节可在竖直平面内转动,用于确定绝缘子串推送机构相对于绝缘子的方位.整个机械手2共有4个连杆和4个关节,其结构如图 6(a)所示.

|
| 图 6 机械手2实体模型及其连杆坐标系 Fig. 6 Solid model and D-H coordinate system of 4-DOF mechanical arm |
D-H方法采用公共法线距离a和垂直于所在平面内两轴的夹角α来描述一个连杆;采用两连杆的偏置d和两连杆法线的夹角θ来表示相邻两杆的关系[8].对每个杆件在关节轴处可建立一个正规的笛卡尔坐标系,再加上基座坐标系.本文采用改进的D-H法建立4个杆件的固接坐标系,建立在关节i+1处的坐标系固联在杆件i上,当关节驱动器推动关节i时,杆件i将相对于杆件i-1运动,在横移体处设定基坐标系,在绝缘子推送装置上设定工具坐标系.机械手2 D-H坐标系如图 6(b)所示.在此基础上,列出末端滚轮相对于基坐标的D-H参数表,如表 1所示.
| 连杆编号i | 杆长ai-1/mm | 扭角αi-1/(°) | 偏置di | 关节角θi | 关节变量范围 |
| 1 | -352 | 0 | d1 | 0 | 8.5~220.5 mm |
| 2 | 91 | 90 | 0 | θ2 | -90°~90° |
| 3 | 0 | 90 | d3 | 0 | 315.5~465.5 mm |
| 4 | 0 | -90 | d4 | 0 | -158.5~12.5 mm |
在对关节轨迹进行插值时,可以选取不同类型的关节插值函数,生成不同的轨迹.根据所选择的关节插值函数的不同,关节轨迹的插值方法主要有三次多项式插值、过路径点的三次多项式插值、高阶多项式插值、用抛物线过渡的线性插值和用抛物线过渡的过路径点线性插值等.其中三次多项式插值方法只适用于关节起始、终止速度为零的运动情况,是过路径点的三次多项式插值方法的特殊情况.而高阶多项式插值适用于对路径的起始点和终止点都规定了关节的位置、速度和加速度的情况.结合对巡线机器人运动的控制要求,本节采用过路径点的三次多项式插值方法对每个动作规划单元的关节进行插值.
设在路径点处,关节变量的值和速度分别qf和

 (1)
(1)
由式(1)可唯一确定一个三次多项式:
 (2)
(2)
求解可得:
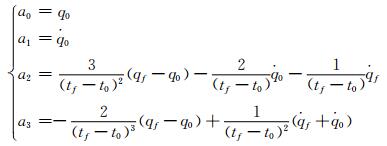 (3)
(3)
将式(3)代入式(2),即可求得关节变量的运动函数.
根据前文的运动流程规划,在机器人对悬垂线夹进行粗定位之前,双作业机械手需由初始位姿调整至工作位姿,在此过程中,机械手2的横移关节、旋转关节、伸缩关节均需要运动至设定值.在机械手1定位碗头挂板后,机器人的行走平台固定,此时机械手2的基座标也相对绝缘子串固定,对机械手2的横移关节以及纵移关节分别进行调节.由于此处单独对机械手2进行轨迹规划,因此省略机械手1运动的时间段,设定机械手2各关节的运动时序及相应的关节变量值如表 2所示.
| 时刻t/s | 关节变量d1/mm | 关节变量θ2 | 关节变量d3/mm | 关节变量d4/mm |
| 0 | 8.5 | -π/2 | 315.5 | -158.5 |
| 5.0 | 8.5 | π/2 | 465.5 | -158.5 |
| 10.0 | 186.5 | π/2 | 465.5 | -158.5 |
| 15.0 | 186.5 | π/2 | 465.5 | -1.0 |
按照关节轨迹插值方法,将以上关节变量值代入式(3),即可得到机械手2各关节的运动函数,求解结果如表 3所示.

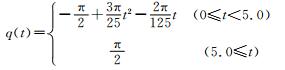


根据表 3描述出机械手2各关节的运动函数,在ADAMS中仿真得到其在整个工作规划中关节变量相应的位移(角度)和速度(角速度)曲线分别如图 7中的实线和虚线所示.从轨迹曲线中可以看出:位移(角度)曲线相对而言比较平滑,速度(角速度)曲线具有良好的连续性.说明该机器人的执行末端具有良好的稳定性,确保了在工作状态中的良好工况.

|
| 图 7 关节变量运动轨迹曲线 Fig. 7 Joint variable trajectory curves |
根据上文得到的各关节运动函数对机械手2进行ADAMS运动学仿真,得到了机械手2作业末端运动全过程的路径曲线,如图 8所示.在后处理程序中得到末端夹爪相对于前行走轮质心在X(竖向)、Y(纵向)、Z(横向)3个方向上的运动特性曲线,如图 9所示.

|
| 图 8 作业末端运动路径 Fig. 8 Terminal motion path |

|
| 图 9 作业末端运动特性曲线 Fig. 9 Terminal movement characteristic curves |
结合图 8、图 9可以看出,按照既定的关节轨迹规划,在前5.0 s,旋转关节和伸缩关节运动,使机械手2的作业末端在X方向上产生位移,在其后的时间里,旋转关节和伸缩关节停止运动,故X方向的位移恒定不变;Z方向上产生的位移由旋转关节和横移关节的运动决定,在前5.0 s旋转关节的转角为180°,相应的Z方向上的位移先增加而后减少,5.0~10.0 s由于横移关节的运动,Z方向上的位移逐步增加,10.0 s之后保持恒定不变;Y方向上产生的位移主要由纵移关节决定,在10.0~15.0 s内,随着纵移关节的移动,Y方向上的位移产生变化.在机械手2运动过程中质心同样也会产生微小的运动,前10.0 s可以很清楚地观察到作业末端在Y方向上位移的抖动.以上仿真结果证明了该工况仿真模型的正确性,同时各关节运动轨迹规划满足该工况的运动学要求.
5 样机与试验由于机械手2的运动位姿可由位置环进行调节,将轨迹规划中确定的关节变量值赋予位置环,使机械手2按照规定的轨迹运动,最终实现既定的功能,如图 10所示.

|
| 图 10 现场试验情况 Fig. 10 Field test conditions |
通过在实际带电线路上的作业试验,机器人实现了全部作业功能,并与人配合,实现了机器人等电位、人地电位的机器人和人工混合带电作业,解决了人工不进入等电位的绝缘子带电更换作业问题.后续工作是对人-眼视觉定位及其伺服控制进行研究,并融合越障移动机器人平台技术进行机器人作业功能拓展.
| [1] |
Aracil A, Pinto E, Ferre M.Robots for live-power lines: maintenance and inspection task[C]//15th Triennail Work Congress, Bacelona, Spain, 2002. http://www.sciencedirect.com/science/article/pii/S1474667015392351
|
| [2] |
Kurosh Zarei-nia, Nariman Sepehri. Haptic-enabled control of hydraulic manipulators applied to power line maintenance: concept & implementation[C]//IEEE 2010 1st International Conference on Applied Robotics for the Power Industry, Montréal, Canada, October 5-7, 2010.
|
| [3] |
Wu G P, Xiao H, Xiao X H, et al. Transmission line inspection robot and deicing robot: Key technologies, prototypes and applications[C]//2010 1st ICARP, Montreal, Canada, 2010: 1-6.
|
| [4] |
Nicolas Pouliot, Serge Montambault. Line scout technology: from inspection to robotic maintenance on live transmission power lines[C]//IEEE International Conference on Robotics and Automation, Kobe, Japan, May 12-17, 2009: 1034-1040.
|
| [5] |
Bai Y C, Wu U P, Xiao H, et al. Overhead high-voltage transmission line deicing robot system and experiment study[C]//ICIRA, Shanghai, China, 2010: 227-239. http://link.springer.com/10.1007/978-3-642-16587-0_21
|
| [6] |
高森, 卢刚, 郭世照, 等.超高压输电线路清障机器人: 中国, 201310669124.4[P].2013-12-11. Gao Sen, Lu Gang, Guo Shizhao, et al. Cleaning Robot for EHV Transmission Lines: CHINA, 201310669124.4[P].2013-12-11. |
| [7] |
王仲民, 崔世钢, 岳宏. 机器人关节空间的轨迹规划研究[J]. 机床与液压, 2005(2): 63-65. Wang Zhongmin, Cui Shigang, Yue Hong. The research on robot's trajectory planning in joint space[J]. Machine Tool & Hydraulics, 2005(2): 63-65. DOI:10.3969/j.issn.1001-3881.2005.02.023 |
| [8] |
熊有伦, 丁汉, 刘恩沧. 机器人学[M]. 北京: 机械工业出版社, 1993: 69-72. Xiong Youlun, Ding Han, Liu Encang. Robotics[M]. Beijing: Mechanical Industry Press, 1993: 69-72. |
| [9] |
罗家佳, 胡国清. 基于Matlab的机器人运动仿真研究[J]. 厦门大学学报(自然科学版), 2005, 44(5): 640-644. Luo Jiajia, Hu Guoqing. Study on the simulation of robot motion based on Matlab[J]. Journal of Xiamen University(Natural Science), 2005, 44(5): 640-644. DOI:10.3321/j.issn:0438-0479.2005.05.013 |
| [10] |
Peter I Corke.Robotics Toolbox for Matlab (Release 8)[R], 2008.
|